タイワンハブ捕獲prjにおけるハードウェア開発事例【調査実験編】
2024.2.16

今回はハードウェア開発の取り組みを事例を交えてご紹介します。
テーマは「野外IoT向け撮影・通信デバイス開発」です。
「調査実験編」と「設計製作編」の前後編でレポートします。
開発背景
本デバイスは弊社が参加する実証実験「タイワンハブの新たな捕獲罠の開発」プロジェクトの一環として開発しています。(以下:捕獲罠をワナ箱と呼びます)
プロジェクトの詳細はプレスリリースをご覧ください。
https://www.atpress.ne.jp/news/332442
本プロジェクトにおける弊社の担当は「遠隔検知システム」です。その内訳は大きく「撮影・通信デバイス開発」と「AIシステム開発・結果の可視化」の2種類あります。
本記事では「撮影・通信デバイス開発」(以下:デバイス開発)についてお伝えします。
ワナ箱の設置現場を確認する
現地調査からデバイス開発に必要な要素を洗い出します。
設置場所:タイワンハブが出やすい山や畑のような場所で、風雨の影響を受ける。
設置間隔:ある程度の距離があり、ワナ箱同士を有線で繋ぐ事は難しい距離。
設置台数:捕獲確率を上げるためワナの台数が必要で、従来の生き餌方式のワナ箱は全体で数百基ほど設置されている。
内部空間:狭く暗い、台風などの激しい降雨時は水の侵入もある。
電源環境:AC電源を引くことは難しい。ソーラーバッテリーがメイン。
開発の方向性
洗い出した要素を元に開発の方向性を以下のように定めました。
防水性(防滴):野外で台風などの影響からデバイスを保護できる構造
→現場での作業性を考えてモジュール化する。機材同士をUSBなどで接続する。
低コスト:将来的に数百基のワナに設置することを想定。デバイスの単価と運用コストを抑える
→安価な汎用パーツで構成する。スター型構成で通信費(親機の台数)を抑える。
入手性:汎用パーツで安価に複製ができる
→ラズベリーパイ(以下、ラズパイ)を使用する。SDカードなので複製も容易。
照明付き広角カメラ:ワナ箱内部をなるべく死角なく全体的に撮影できるカメラ
→市場に既製品で適合する製品を調査。また、最適な画角を実験で確認する。
シンプルな電源管理:バッテリーを食い尽くさないように電気を管理する仕組みが必要
→ラズパイを定期的に起動・停止する装置をつけ、間欠動作で電力を節約する。
以下の項目について検証を行います。
- 親子機構成が実際どの程度使えそうか(距離や環境)?
- カメラの画角と写りの良い取り付け位置はどこか?
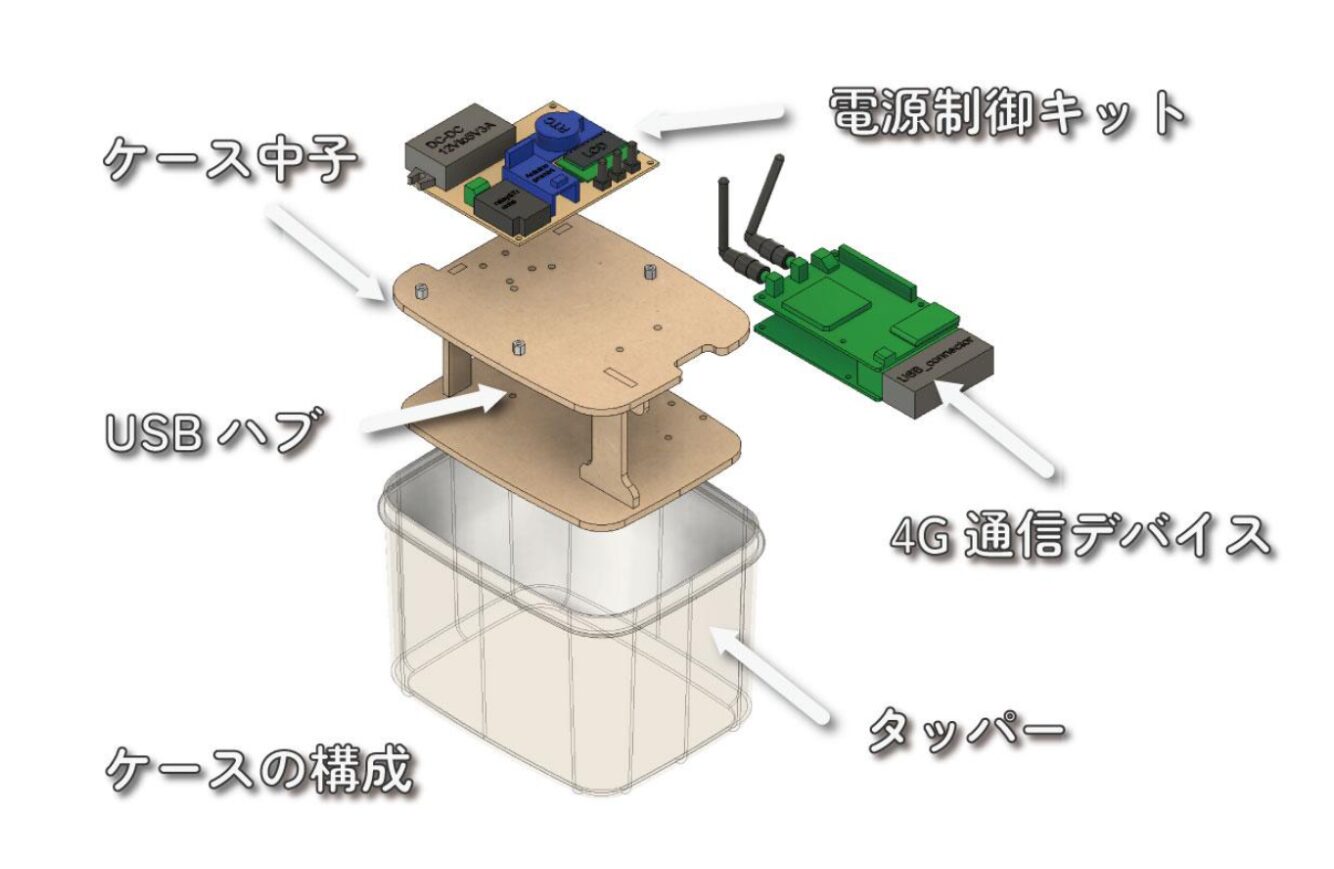
撮影・通信デバイスの構成
開発の方向性を元に3つのモジュールで構成する事にします。

- 撮影モジュール
- 制御・通信モジュール
- 電源管理モジュール
スター型構成の実験
スター型で構成することが可能か確認するため、親機と子機がwifi接続できる距離を検証します。
実験用として試作機(親機1機と子機1機)を製作しました。
メモ:wifiドングルは2.4GHz帯です。また、本体は無加工・無改造です。
- 親機には4Gの通信装置とwifi(アクセスポイント)を搭載
- 子機にはwifiのみを搭載

実験方法:親機から子機にpingを打ち距離や環境の変化による影響を確認する。
実験内容:
1、見通し通信距離テスト
2、地形の影響テスト
1、見通し通信距離テスト


2、地形の影響テスト

テスト結果:
1、見通しで約400m程度は通信可能
2、距離15m高低差3m、親子機間に竹林を挟む程度では通信に支障はなかった。
実験からwifiによる親子機構成は可能である事が確認できました。
(設置現場の環境はまちまちなのでその点は状況に合わせた対応を実施する必要ありそうです)
カメラ画角と取り付け位置の実験
ワナ箱全体の撮影に適した画角を決める実験を行いました。
大きく2段階に分けて検証を進めます。
1、カメラ写りの良いワナ箱構造の検討
→使用されているワナ箱のボリューム模型を製作。タイワンハブ全体を死角なく撮影する構造を検討します。
模型にヘビのおもちゃを入れて写りの良いカメラ配置と画角を確認します。

結果:現状のワナ箱と構造的な乖離が大きい。構造変更が大きすぎて現実的ではない。
カメラと対象物の距離が足りない、ハブ誘引用の擬似餌と干渉するなど問題があり、構造変更に必要な作業工数から考えても現実的ではないと判断しました。
そこで、既存のワナ箱に適したカメラを検討する方向に切り替えます。
2、既存ワナ箱に適した画角とカメラ位置の検討
既存のワナ箱を使い最も写りが良い画角と取り付け位置を検討します。また、AIチームに撮影サンプルを共有し、AI検知に対して条件の良い画角の検証を依頼しました。
結果:画角は160°、取り付け位置はワナ箱奥から入り口方向を映す角度が良い。
この結果を元にカメラモジュール設計を進めます。
調査実験編はこれで以上になります。
最後に
実験と現地調査から製作するモジュールに必要な要素の確認と検証をしました。
次回の「設計製作編」はどのようにハードウェアという形にまとめたのかをお伝えします。
システム開発・保守、導入支援など、
お気軽にご相談ください